从矩阵与空间操作的关系理解CSS3的transform(科普文)
本文共 6638 字,大约阅读时间需要 22 分钟。
从矩阵与空间操作的关系理解CSS3的transform(科普文)
注:文中图片取材于并加以合适的修改!推荐大家去观看这套视频,另外这套视频毕竟是一套数学性质的视频,不包含css的相关讲述,这篇文章将借鉴这套视频的思路为你讲述css变换的原理。
- 矩阵
- 概述
- 向量
- 什么是向量
- 基向量
- 线性变换
- 如何用数值描述线性变换
- 回到 CSS 的 transform
矩阵概述
矩阵,是线性代数中涉及的内容,线性代数在科学领域有很多应用的场景,如下:
transform做 2D/3D 的变换,其中就应用到了矩阵的知识,这篇文章并不是一篇数学性质的文章,所以大家不要怕看了之后会感觉一阵眩晕,这篇文章的目的在于:从矩阵与空间之间的关系讲述为什么矩阵可以应用在空间操作(变换)。 先看一段 css 代码: /* 2D */transform: matrix(1, 0, 0, 1, 0, 0);/* 3D */transform: matrix(1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1);上面两行 css 代码其实什么变换都不会做,因为那是变换的默认状态,即没有变换。但是其中使用到了
matrix,翻译成中文叫做:矩阵。如果有深入研究过 css 的同学对这两行代码也许不陌生,但是大多数人在使用 transform 变换时很少直接使用 matrix 矩阵,除非你不想让人看懂你在做些什么鸟变换...,所以更多的时候,我们会使用类似如下语法: transform: translateX(100px) rotateZ(30deg);如上代码所示,一目了然,要做什么变换大家一看就知道了。但其实,这只是一个语法糖,其底层依然使用的是
matrix。 如果想要理解矩阵为何可以应用到 2D/3D 变换,那么只从数值水平的角度理解是不够的,你需要从几何的角度去理解矩阵,这存在着根本性的差异。而这,也就是本篇文章的真正意义。 不过,这需要我们先了解一些必要的基本概念,这些概念至关重要,首先就是向量 向量
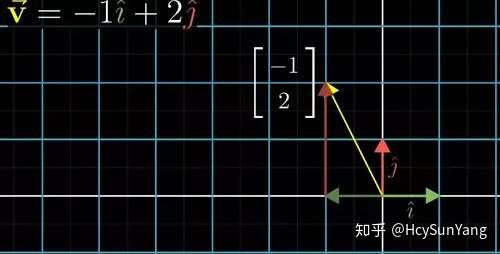
什么是向量?既然矩阵是线性代数的一部分,那么就不得不提到 向量,因为向量是线性代数最基础、最根源的组成部分,所以我们要先搞清楚,向量是什么?我说过,这篇文章不会很“数学”,所以大家不要被吓到。用一句话描述向量是什么: 向量:空间中的箭头 这个在大家的印象里应该很好理解,这个箭头由两个因素决定:方向 和 长度,我们先把目光局限在二维空间下,如图: 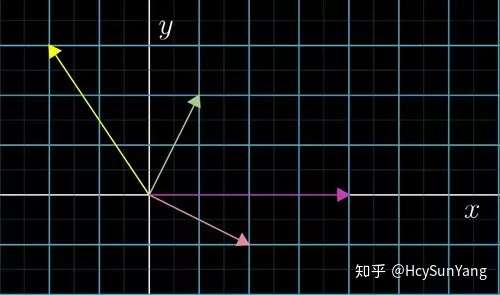
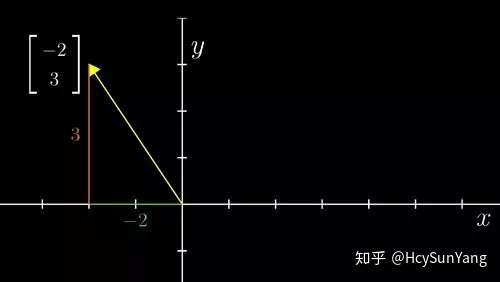
P(2, 8) 表示点 P 的坐标为 (2, 8),为了区分点和向量,在表示向量时,我们通常把坐标竖着写,然后用一对儿中括号来描述,如上图中的: 
基向量
基向量,也叫单位向量,是单位长度为1的向量,如下图中:i帽 和 j帽 就是这个二维坐标系的基向量: 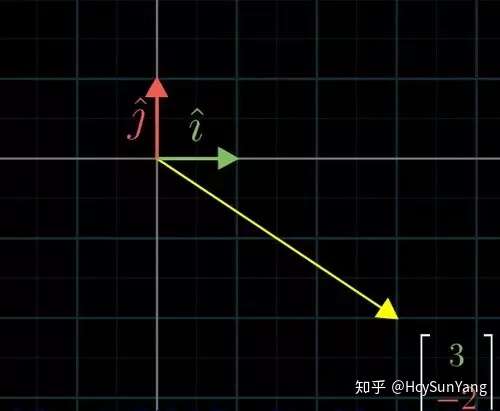
线性变换
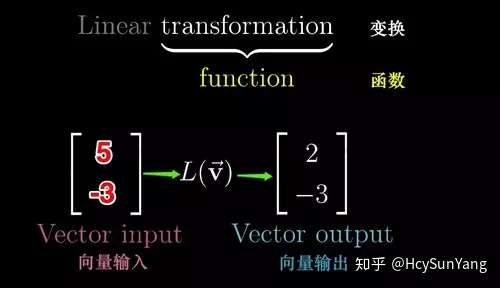
“变换”本质上是“函数”的一种花哨的叫法,玩编程的都知道函数,与在数学中的概念类似,函数接收输入的内容,并输出对应的结果,如图: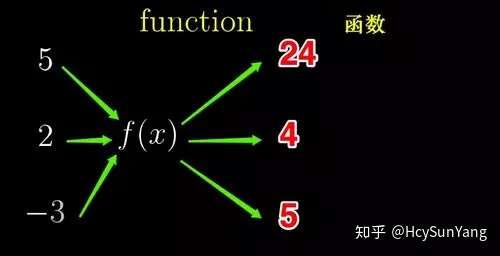
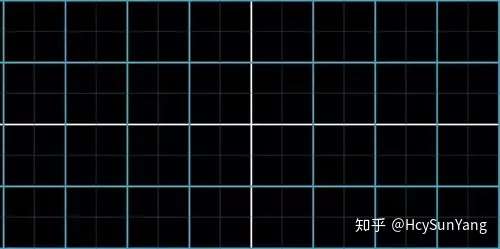
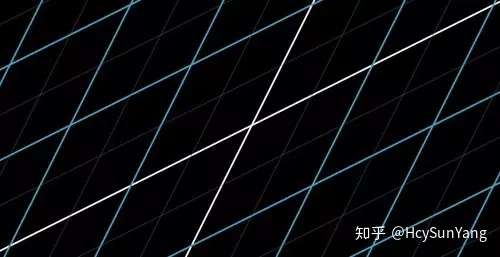
- 1、直线在变换后仍然为直线,不能有所弯曲
- 2、原点不能移动
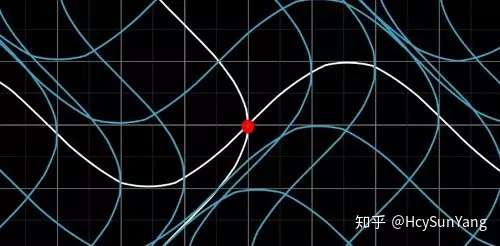
如下变换,就不是一个线性变换,因为直线变成了曲线:
如何用数值描述线性变换?
在上一小节中我们知道,空间的变换也可以说是向量的变换,而向量在空间中,可以用一组有序的数字列表来表示(即向量的坐标),所以向量变换前后,必然会引起“有序数字列表的变换”,那么我们是否可以用数字去描述变换呢? 之前在向量一节中,我们了解过基向量,单位长度为1,其实空间中的任意一个向量我们都可以看做是:基向量变换后的和向量,如下图: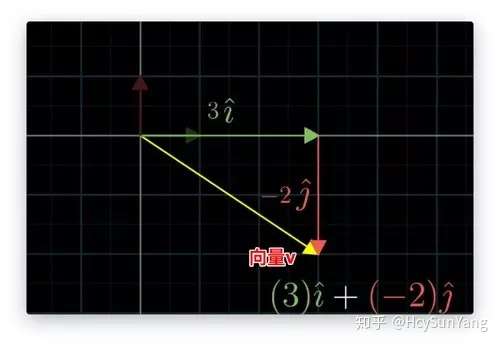

如果我们把 3 和 -2 看做两个标量,也就是纯数字,那么向量 v 可以看做是基向量被标量缩放后相加得到的和向量: v = 3i + (-2j)
(1, 0)【注意:为了方便,这里就用圆括号代表向量的坐标,下同】,基向量 j 的坐标是 (0, 1),假设经过了某些变换之后,基向量 i 的坐标变为 (1, -2),基向量 j 的坐标变为 (3, 0),如下图: 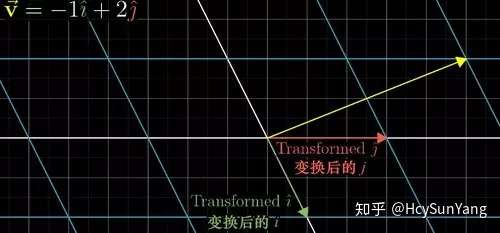

i帽 和 j帽 的坐标推算出变换后 v 的坐标: 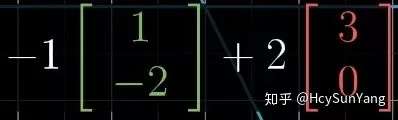
(5, 2),即: 
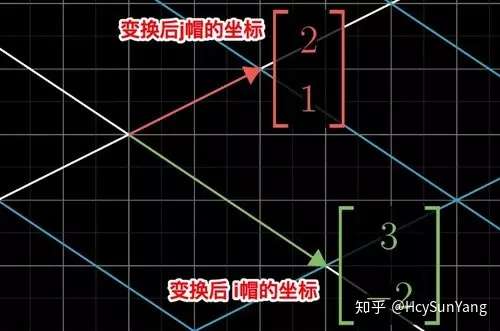
(x, y),我们可以通过变换后的基向量的坐标推断出该向量变换后的坐标呢?答案是肯定的,假如基向量变换后的坐标 i帽 和 j帽 如下图: 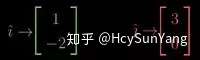
(x, y) 在经过变换后的坐标计算如下: 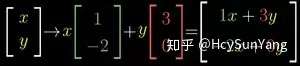
2 x 2 的格子中,我们称之为 2 x 2 矩阵: 
2 x 2 矩阵的时候,你的第一几何直观反映应该是:它描述了一个二维空间的变换。 我们把情况一般化,如下图: 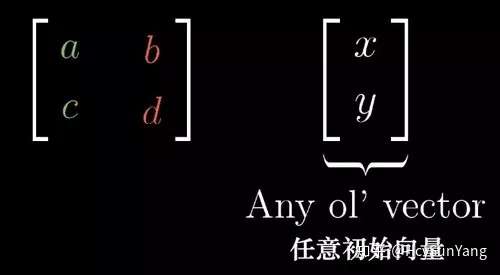
2 x 2 的矩阵 [a, c] [b, d],其中 [a, c] 是基向量 i 变换后的坐标,[b, d]是基向量 j 变换后的坐标,那么根据这个变换,以及线性变换的性质,我们可以推断出任意向量 [x, y] 变换后的坐标: 
2 x 2 的矩阵,你的直观几何感受应该是,第一列的两个数是对基向量 i 的变换,第二列的两个数是对基向量 j 的变换,这四个数字组成的 2 x 2 的矩阵,描述了一个对空间的线性变换,我们可以根据这个变换推断出任意一点(或者任意向量)变换后的坐标。 其实我们还可以换一个角度考虑,我们就单纯的把 2 x 2 矩阵叫做变换,那么向量与矩阵的乘积,就可以看做是该向量应用了这个变换,这就是矩阵向量乘法的几何意义。 回到 CSS 的 transform
说了一大堆,是时候回到CSS 的 transform,我们来看一下2D变换下 transform 属性的 matrix 写法: transform: matrix(a, b, c, d, e, f);在文章开始我们提到 matrix 中各个参数默认值如下:
transform: matrix(1, 0, 0, 1, 0, 0);有的同学可能会问:说好的
2 x 2 矩阵也就是四个数字就能确定一个二维空间变换,你这里明明有6个数啊,其实,transform 2D变换是一个 3 * 3 的矩阵,为什么是这样?因为:位移(translate),前面我们说过,线性变换要满足其中一个特点:原点不能移动,但是位移却使原点发生了移动,所以 2 x 2 矩阵满足不了需求,只能再加一列,也就是 3 x 3 的矩阵。 把 matrix 中的 a b c d e f 放到一个 3 x 3 的矩阵中应该是这样的: 
位移(translate)的情况下,[a, b] [c, d] 四个数字组成的 2 x 2 矩阵是完全可以描述2D变换的,现在我们只看由 [a, b] [c, d] 组成的 2 x 2 矩阵: 
a b c d 四个数字使用默认值替换一下,即:a = 1,b = 0,c = 0,d = 1,如下: 
(1, 0) 应该是基向量 i变换后的坐标,但是基向量 i 在变换前的坐标就是 (1, 0),也就是说没有任何变换,同理,基向量 j 也没有任何变换,所以说,这就是 a b c d 默认值设定为下面代码所示的值的原因: transform: matrix(a, b, c, d, e, f);// a b c d 默认值为 1 0 0 1transform: matrix(1, 0, 0, 1, e, f);那么大家想想一下,我们把
a 的值从 1 变为 2 会发生什么?如果把 a 的值从 1 变为 2 那么矩阵如下: 
(1, 0) 变成了 (2, 0),这是在干什么?是不是基向量 i 被放大为了原来的二倍?举一个通俗的例子:原本单位长度1代表20px,被放大后单位长度1则代表40px。同样的,当我们把 a 的值从 1 变为 0.5 则意味着把基向量 i 缩小为原来的一半。事实上:在 transform: matrix() 中,修改 a 的值,就是在改变 x 轴方向的缩放比例: transform: matrix(2, 0, 0, 1, 0, 0);/* 等价于 */transform: scaleX(2);相信大家已经知道了,修改
d 的值,就是改变 y 轴的缩放比例: transform: matrix(1, 0, 0, 4, 0, 0);/* 等价于 */transform: scaleY(4);复制代那么旋转要如何修改
matrix 中的值呢?其实,想要知道如何修改 a b c d 的值,只需要知道,旋转后基向量 i 和 j 的坐标就可以了,将旋转后的坐标对号填入就可以得到变换矩阵,下面,我们就来看看如何确定旋转后基向量 i 和 j 的坐标。 我们知道,在 web 开发中的坐标系和数学中的坐标系在正方向的选取上不太一致,在大家所熟悉的坐标系中,正方向的选取如下: 
web 开发中,坐标系的正方向选取是这样的: 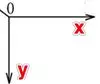
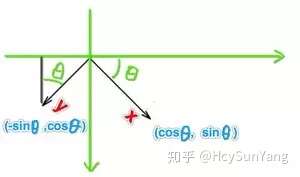
(cosθ, sinθ),单位向量 j的坐标应该是 (-sinθ, cosθ),所以如果用矩阵表示的话,应该是这样的: 
matrix 里,自然就是下面这个样子: transform: matrix(cosθ, sinθ, -sinθ, cosθ, 0, 0)所以,如果我们要顺时针旋转 45 度,下面两种写法是等价的:
/* * Math.cos(Math.PI / 180 * 45) = 0.707106 * Math.sin(Math.PI / 180 * 45) = 0.707106 */transform: matrix(0.707106, 0.707106, -0.707106, 0.707106, 0, 0)/* 等价于 */transform: rotate(45deg);通过上面缩放和旋转的例子,我们已经知道了,
2 x 2 的矩阵确实能够描述二维空间的变换,这也就是矩阵能够操作空间的原因。在 transform 中,除了缩放(scale)、旋转(rotate) 还有倾斜(skew),对于倾斜,类似于我们寻找旋转后基向量的坐标一样,你只需要根据倾斜所定义的变换规则,找到基向量变换后的坐标就可以了,实际上倾斜对应如下规则: transform: matrix(1, tan(θy), tan(θx), 1, 0, 0);大家自己拿只笔在纸上画一画应该就能搞清楚倾斜在做什么样子的变换。 无论 缩放(
scale)、旋转(rotate) 还是倾斜(skew),他们都不会是原点发生改变,所以使用 a b c d 四个数字组成的矩阵完全可以描述,但是不要忘了,我们还有一个 位移(translate),这时,就不得不提到 e f 了,我想我不说大家也都知道了,e f 分别代表了 x y 方向的位移,事实也如大家所想: transform: matrix(1, 0, 0, 1, 100, 200)/* 等价于 */transform: translateX(100px) translateY(200px);至此,
transform 使用 3 x 3 矩阵: 
来描述二维空间变换的方式,以及是如何做到的我们就算讲完了。
除了2D变换,还有3D变换,在transform 中,使用 4 x 4 的矩阵描述3D变换,但实际上,三维空间的线性变换只需要一个 3 x 3 的矩阵就可以描述了,那么为什么搞了一个 4 x 4矩阵呢?实际上这和我们在将二维空间的变换使用 3 x 3 矩阵的道理是一样的,那就是位移。 我们来看一下3D变换的 matrix 默认值: transform: matrix(a, b, c, d, e, f, g, h, i, j, k, l, m, n, o, p);transform: matrix(1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1)这十六个数字就是
4 x 4 矩阵的 16 个数值: 
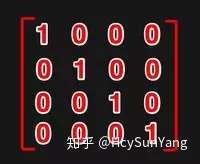

组成的 3 x 3 矩阵用来描述空间的 3D 线性变换,如:rotateX rotateY scaleZ 等等,注意:rotateZ 是 2D 变换哦。
m n o 则分别用来描述位移:translateX translateY translateZ。 小编是一个有着5年工作经验的前端开发工程师,关于前端编程,自己有做材料的整合,一个完整的前端编程学习路线,学习材料和工具,+我的威信收取,免费送给tanzhou-10838大家,希望你也能凭着自己的努力,成为下一个优秀的程序员。
转载地址:http://qjkei.baihongyu.com/
你可能感兴趣的文章
Java学习——Servlet是什么
查看>>
项目总结——传说中的反射竟然是这个样子
查看>>
前端页面——js如何让数据传输更灵活
查看>>
VS发布网站后的文件夹为空
查看>>
ITOO4.0项目总结--成长
查看>>
DRP问题系列——Unhandled event loop exception
查看>>
总结过去——从不着边到步入正轨
查看>>
java学习——XML文件导入
查看>>
java学习——架构的设计是项目的核心
查看>>
Java学习——String变量中的双胞胎
查看>>
java学习——apache commons fileupload实现上传
查看>>
Java学习——JSTL标签与EL表达式之间的微妙关系
查看>>
java学习——Jstl标签库大全
查看>>
java学习——代理模式之动静PK
查看>>
java学习——发送激活邮件-就这么简单
查看>>
Android成长(一)——环境搭建
查看>>
SSH框架——走进Struts2
查看>>
Android成长(二)——两个页面交互
查看>>
Android成长(三)——页面布局
查看>>
bootstrap——完美的分页查询
查看>>